|
Звучит невероятно? Однако, это возможно! Добро пожаловать в мир МИКРОКОНТРОЛЛЕРОВ!
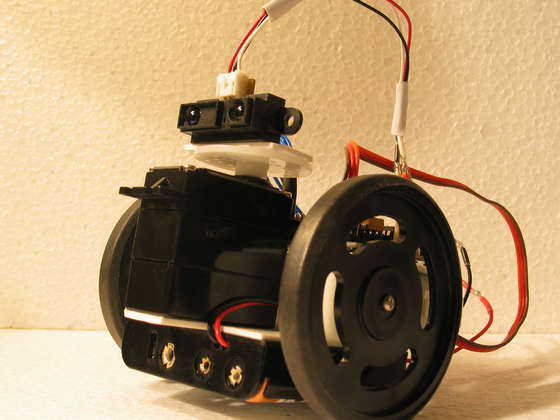
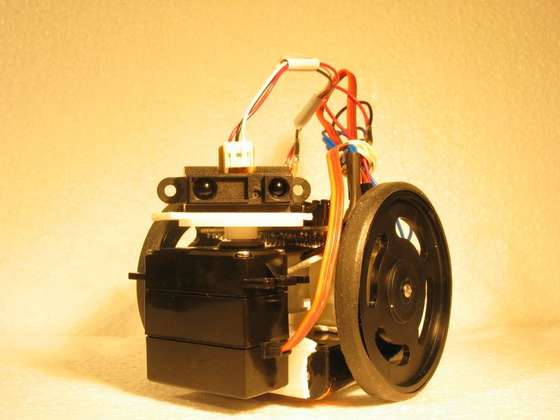
Второй робот - улучшенная версия первого.
Список покупок. Итак, нам понадобятся:
- PICAXE-28X1 (или более поздняя версия) Это - «главный мозг робота».
- Набор для начинающего PICAXE-28X1. Включает в себя отладочную плату, а также все, что может понадобиться для программирования микроконтроллеров. Приобрести надо USB версию программатора, на фотографии изображен похожий, но НЕ соответствующий нашему проекту набор!


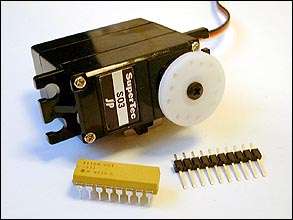
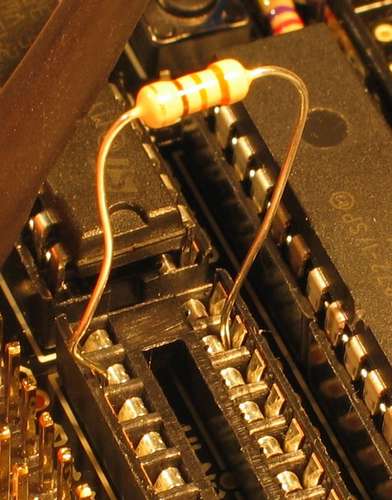
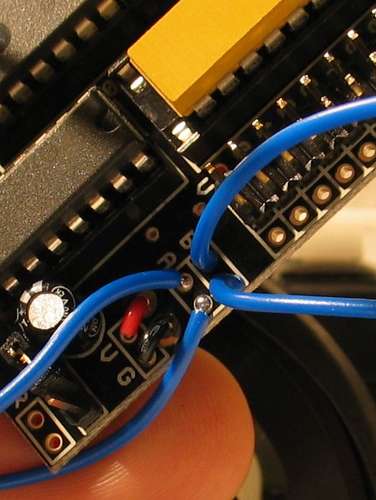
- PICAXE Servo Upgrade Pack. Использовать серводвигатель PICAXE не обязательно, вы можете воспользоваться любым доступным вам серводвигателем, и резистором сопротивлением в 330 Ом вместо желтой микросхемы (см. фото).Значения 3-х проводов: 2 - питание серводвигателя, оставшийся третий - сигнал.
- Sharp GP2D120 IR Sensor - 11.5" / Аналоговый (!) Внимание! Не покупайте цифровую версию!
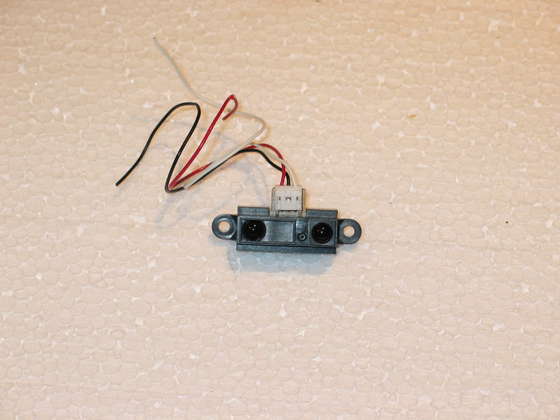
Вообще, предпочтительней использовать ультразвуковой сенсор, однако подключить его сложнее (надо менять исходный код программы), да и стоит он дороже.
- Два моторчика с колесами Чем больше передаточное число - тем сильнее, а значит медленнее, будет ваш робот. Меньшее передаточное число увеличивает скорость, однако уменьшает силу. Я бы рекомендовал что-нибудь между 120:1 и 210:1 для нашего проекта.

- Немного проводов
- Изоляционная лента
- Оборудование для пайки
- «Кусачки»
- Отвертка
- Отсек для элементов питания.
Неплохо было бы к этому списку добавить следующие элементы:
- Несколько светодиодов, что бы усовершенствовать робота;
- Крошечный динамик, что бы создать интересные звуковые эффекты.
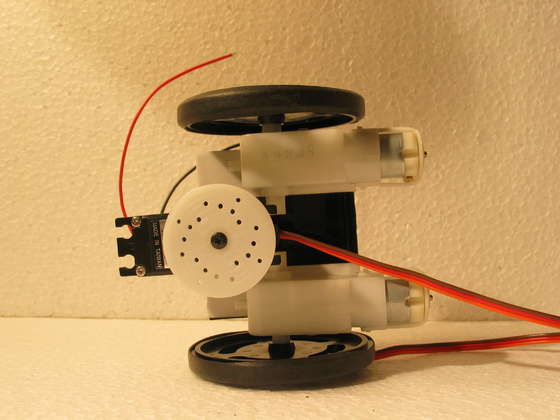
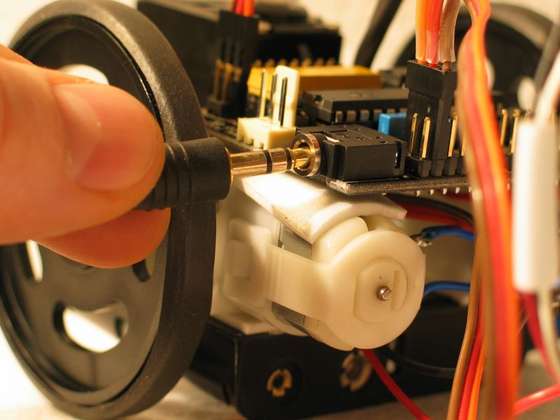
Теперь, когда вы заказали все необходимые компоненты можно приступать непосредственно к созданию робота. Устанавливаем колеса на моторчики и монтируем «резину».
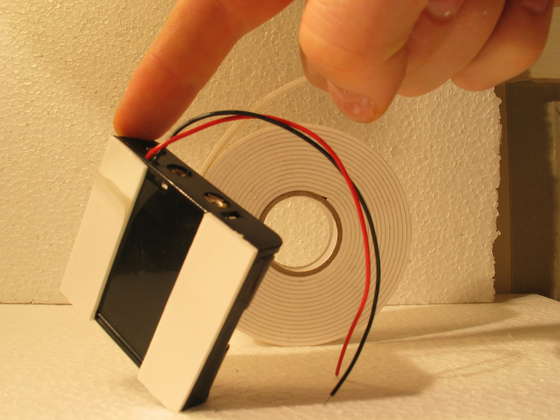
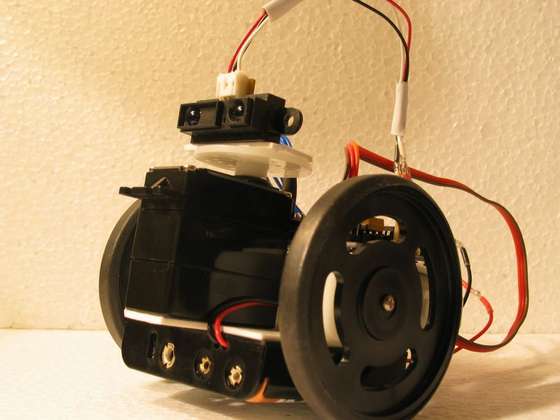
Используем двухстороннюю клейкую ленту что бы устанавливать оборудование. За основу берем отсек для крепления батареек. Над ним «надстраиваем» другие элементы робота. Не забудьте вставить батарейки, что бы правильно сбалансировать робота.


ВНИМАНИЕ! Достаем батарейки, что бы не «сжечь» какой-нибудь дорогой элемент ненароком.
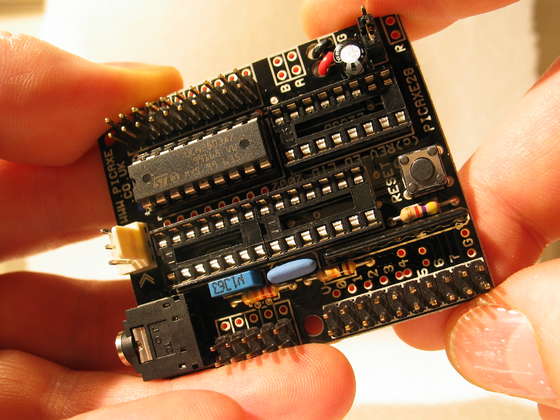
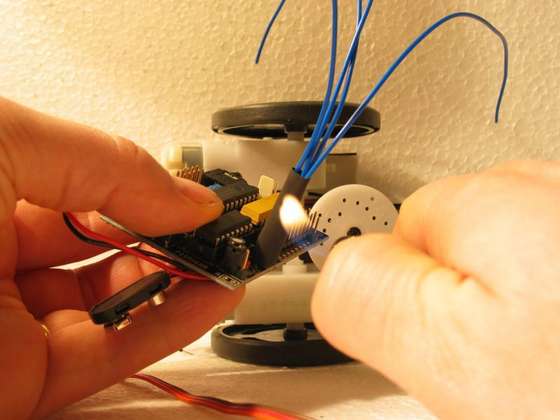
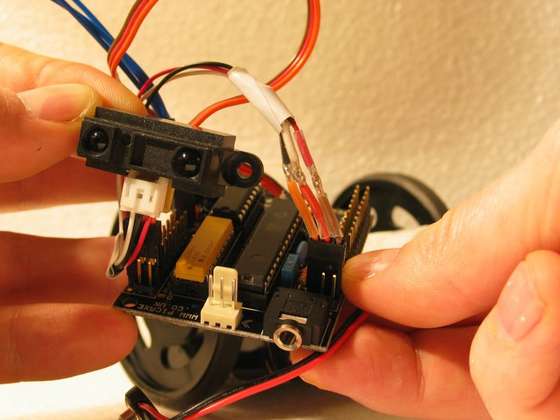
Устанавливаем микросхемы на отладочную плату (см. фотографии). В случае, если вместо рекомендуемого серводвигателя, вы использовали собственный - вместо желтой микросхемы устанавливаем резистор сопротивлением 330 Ом (опять-таки см. фотографию).
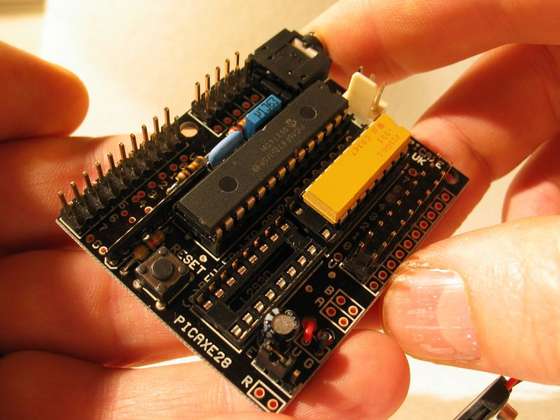
Пояснения : черная микросхема (20 выводов ) - это наш микроконтроллер, микросхема черная поменьше - драйвер двигателей L293D.
Возможно, на обратной стороне отладочной платы окажутся какие-то красные, странные пластмассовые «заглушки» для отверстий - со спокойной совестью снимайте их.
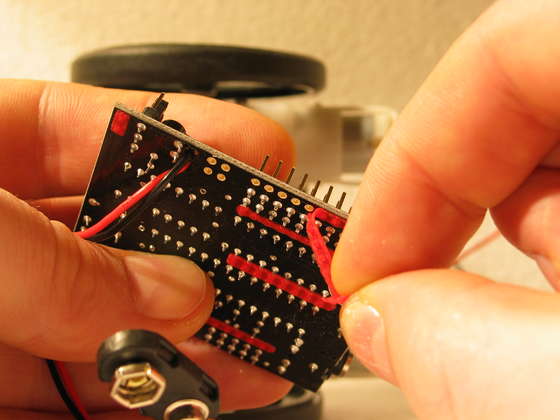
Теперь подключаем двигатели (моторчики) к отверстиям 4 "A & B" (пока, порядок не важен). Как их подключить - дело вкуса. Вы можете либо припаять их, либо сделать соединения.
Припаяем провода к моторчикам. Провода А - к первому, провода В - к второму.
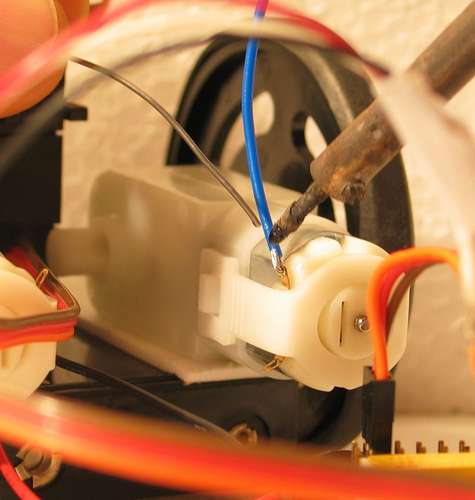
Для подключения серводвигателя припаиваем дополнительный вывод (см. фотографии). Подключаем.
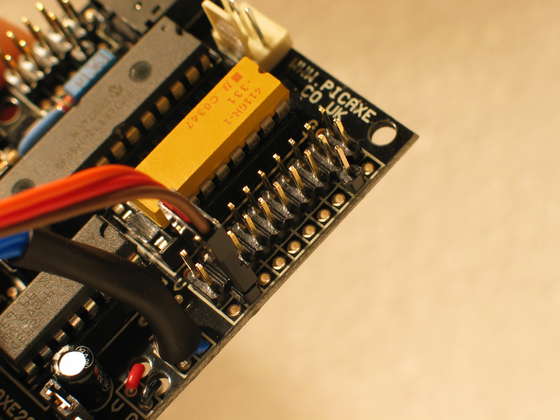

Теперь монтируем «голову» ИК сенсор Sharp. Подключаем по следующему принципу : Красный подключается V1, в руководстве -любое обозначенное как "V". Черный к G, где угодно на плате. Белый к Analogue input 1. Три остальных вывода не забываем подключить к V.
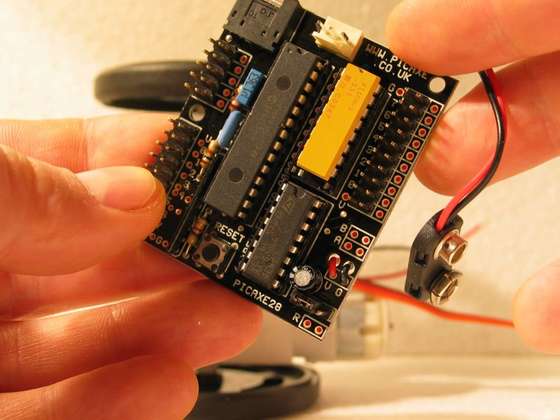
Подключаем батарейки к отладочной плате. Внимание! Плюс («+») батарейки должен быть обязательно подключен к V на отладочной плате (не наоборот!). И еще, не пытаетесь «питать» устройство от источника напряжением более 6В, забудьте о «Кронах»!
Устанавливаем ПО Picaxe Programming Editor на вашем ПК. Подключаем ПК к роботу (до сих пор «безголовому», т.е. сенсор еще не должен быть подключен!). Запускаем редактор и пишем (или копируем) следующую строку: servo 0, 150 Нажимаем F5. Ждем. Если что-то пошло не так - попробуйте проверить, правильно ли все подключено. servo 0, 200
Сервомотор должен немного покрутиться и остановится. Что бы вернуться пишем: servo 0, 150 Теперь можно устанавливать ИК сенсор. Финишная прямая.
Копируем код и нажимаем F5 (робот в это время подключен к ПК).
| 













